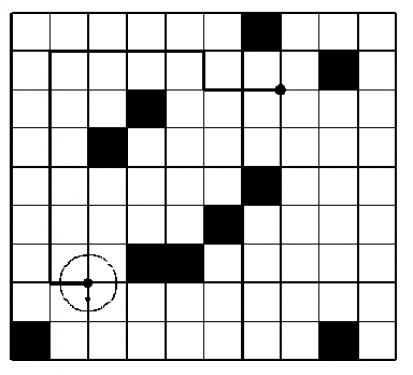
洛谷《P1126》题解 题面 题目描述 机器人移动学会(RMI)现在正尝试用机器人搬运物品。机器人的形状是一个直径1.6米的球。在试验阶段,机器人被用于在一个储藏室中搬运货物。储藏室是一个 N×M 的网格,有些格子为不可移动的障碍。机器人的中心总是在格点上,当然,机器人必须在最短的时间内把物品搬运到指定的地方。机器人接受的指令有:向前移动1步(Creep);向前移动2步(Walk);向前移动3步(Run);向左转(Left);向右转(Right)。每个指令所需要的时间为1秒。请你计算一下机器人完成任务所需的最少时间。
输入格式 第一行为两个正整数_N,M(N,M ≤ 50),下面_N_行是储藏室的构造,0表示无障碍,1表示有障碍,数字之间用一个空格隔开。接着一行有4个整数和1个大写字母,分别为起始点和目标点左上角网格的行与列,起始时的面对方向( 东E,南S,西W,北N_),数与数,数与字母之间均用一个空格隔开。终点的面向方向是任意的。
输出格式 一个整数,表示机器人完成任务所需的最少时间。如果无法到达,输出-1。
输入输出样例 输入 1 2 3 4 5 6 7 8 9 10 11 9 10 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 1 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 1 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 1 0 7 2 2 7 S
输出 思路 注意点
首先,这道题需要注意:障碍物在格子上的,但是机器人是在交叉点上走路的。某人自信的写完代码后(就是我)写完代码后发现题读错了。
那么还要注意到的地方是起点和终点是可能重合的,需要特殊处理;起点也可能是障碍物,也要做特殊处理。
还有要注意到的是,对于每一步,你走一个格点,两个格点或三个格点所耗时间都是1,不要搞乱;而每转90°,也要耗一定时间,所以千万要小心。
注意机器人是球形且有直径,所以机器人并不能到达储藏室的边缘。
注意在移动时机器人也需要一步一步移动,所以机器人不能跨过障碍物,即遇到障碍物就必须停止。
所需变量 1 2 3 4 5 int fx[5 ]={0 ,-1 ,1 ,0 ,0 }; int fy[5 ]={0 ,0 ,0 ,-1 ,1 };int ft[5 ]={0 ,1 ,4 ,2 ,3 };int fft[5 ]={0 ,1 ,3 ,4 ,2 };int abc[5 ]={0 ,1 ,2 ,1 ,0 };
fx[i]表示方向i(编号)的x的进退情况 。
fy[i]表示方向i(编号)的y的进退情况 。
ft[i]表示顺时针排列各个方向的编号(上1 右4 下2 左3) 。
fft[i]表示数字i在ft[]数组中的下标 。
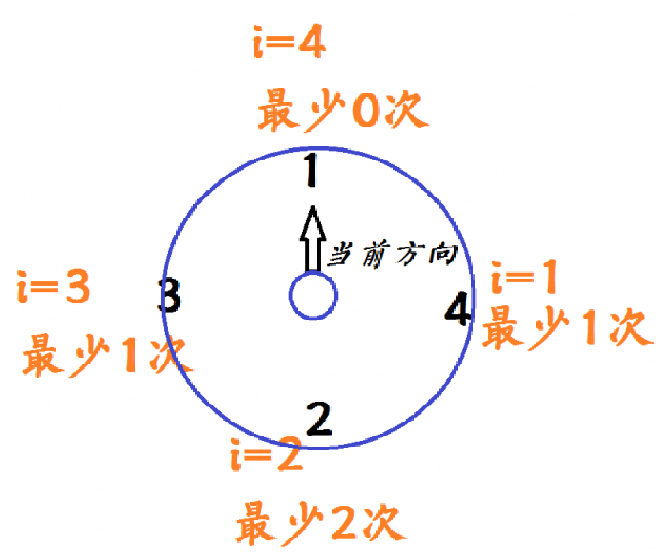
abc[5]表示转到[顺时针转i次到达的那个方向]的最短次数 。
其中ft数组和abc数组比较难理解
下面我们逐个讲讲
abc数组当i=4,最少0次;当i=3,最少1次;当i=2,最少2次;当i=1,最少1次
不难看出当对于不同的i,也就是顺时针转动i次时,对应的最小旋转次数就是abc[i]。
ft数组
图中蓝圈内四个方向各有一个黑色数字代表方向编号,那么我们顺时针遍历一下就是1 4 2 3,是比较好理解的。
BFS状态转移方程 边界处理,因为机器人是有体积的,而我们是将其右上角当成其位置进行广搜,所以要保证:
代码细节 用队列存储每一个格点的信息,然后起点入队,每次从队首取出一个元素,根据这个元素旋转,直行,得到一个新的坐标,然后判断由这种方式到达的这个点是否是耗时最短的一种方式,此处用f[i][j]数组表示,然后队列为空后,输出f[终点的x][终点的y]即可。
AC代码 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 #include <bits/stdc++.h> using namespace std;int sd[55 ][55 ];int a[55 ][55 ];int n, m;int x11, y11;int x2, y2;int f[55 ][55 ];int fx[5 ] = {0 , -1 , 1 , 0 , 0 };int fy[5 ] = {0 , 0 , 0 , -1 , 1 };int ft[5 ] = {0 , 1 , 4 , 2 , 3 };int fft[5 ] = {0 , 1 , 3 , 4 , 2 };int abc[5 ] = {0 , 1 , 2 , 1 , 0 };struct node { int x, y; int t; int time; }; queue<node> q; string ch; int cto;void fxto () switch 0 ]) { case 'N' : cto = 1 ; break ; case 'S' : cto = 2 ; break ; case 'W' : cto = 3 ; break ; case 'E' : cto = 4 ; break ; } return ; } void change () for (int i = 1 ; i <= n; ++i) { for (int j = 1 ; j <= m; ++j) { if (sd[i][j] == 1 ) { a[i - 1 ][j] = 1 ; a[i][j - 1 ] = 1 ; a[i - 1 ][j - 1 ] = 1 ; a[i][j] = 1 ; } } } } int main () cin >> n >> m; for (int i = 1 ; i <= n; ++i) { for (int j = 1 ; j <= m; ++j) { scanf ("%d" , &sd[i][j]); } } cin >> x11 >> y11 >> x2 >> y2; cin >> ch; fxto (); change (); node first; first.x = x11; first.y = y11; first.t = cto; first.time = 0 ; q.push (first); node u, d; while (!q.empty ()) { u = q.front (); q.pop (); for (int i = 1 ; i <= 4 ; ++i) { int zhuan = abc[i]; int fangx = fft[u.t] + i; if (fangx == 5 ) fangx = 1 ; if (fangx == 6 ) fangx = 2 ; if (fangx == 7 ) fangx = 3 ; if (fangx == 8 ) fangx = 4 ; fangx = ft[fangx]; for (int j = 1 ; j <= 3 ; ++j) { int lsx = u.x + fx[fangx] * j; int lsy = u.y + fy[fangx] * j; if (lsx >= n || lsx <= 0 || lsy >= m || lsy <= 0 || (lsx == x11 && lsy == y11) || a[lsx][lsy] == 1 ) { break ; } if ((u.time + zhuan + 1 < f[u.x + fx[fangx] * j][u.y + fy[fangx] * j] || f[u.x + fx[fangx] * j][u.y + fy[fangx] * j] == 0 ) && a[u.x + fx[fangx] * j][u.y + fy[fangx] * j] == 0 ) { d.x = u.x + fx[fangx] * j; d.y = u.y + fy[fangx] * j; d.t = fangx; d.time = u.time + zhuan + 1 ; f[u.x + fx[fangx] * j][u.y + fy[fangx] * j] = d.time; q.push (d); } } } } if (f[x2][y2] == 0 && (x2 != x11 || y2 != y11)) { cout << "-1" << endl; } else cout << f[x2][y2] << endl; return 0 ; }